
مقدمه: دیود شاتکی نوع دیگری...
در وبلاگهای مدار شارژ RC و مدار دشارژ RC دیدیم که خازن میتواند از طریق مقاومت سری، پر یا تخلیه شود. همچنین آموختیم که زمان صرف شده برای شارژ یا دشارژ کامل خازن برابر 5 ثابت زمانی است.
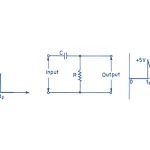
مدارهای RC بسته به نوع و فرکانس شکل موج اعمال شده، توانایی تولید شکلهای متفاوتی از موج RC در خروجی را دارند. در وبلاگهای پیشین مدارهای RC را با منبع تغذیه DC بررسی کردیم. حال اگر به ورودی این مدارها، سیگنال پالسی یا مربعی اعمال کنیم، خروجی و تأثیر آنها بر ثابت زمانی چگونه خواهد بود؟
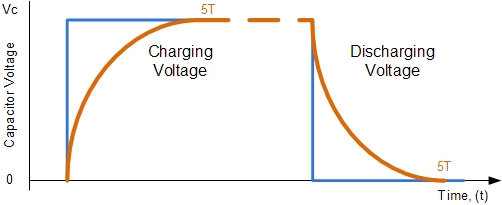
میدانیم که خازن به هنگام اعمال منبع ولتاژ تا 5 ثابت زمانی شارژ و با حذف منبع ولتاژ تا 5 ثابت زمانی تخلیه میشود. در حالت کلی این مقدار 5𝛕 همیشه ثابت میماند. زیرا ثابت زمانی توسط حاصلضرب R و C مشخص میشود. پس برای رسیدن به ثابت زمانی مورد نظر، تنها میتوان مقادیر خازن یا مقاومت را تغییر داد.
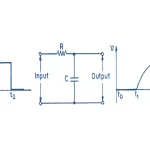
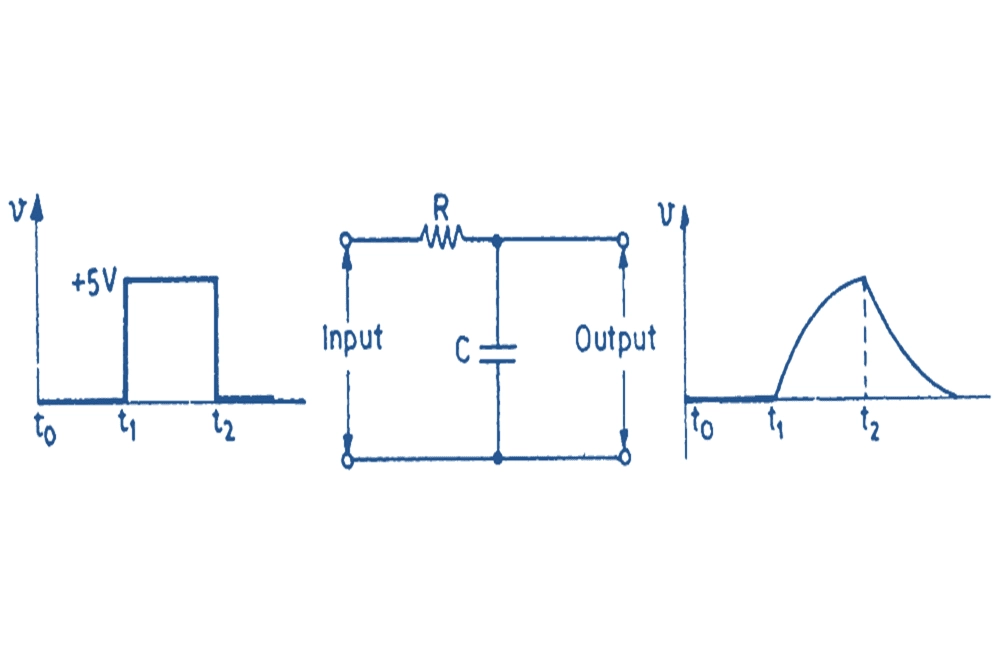
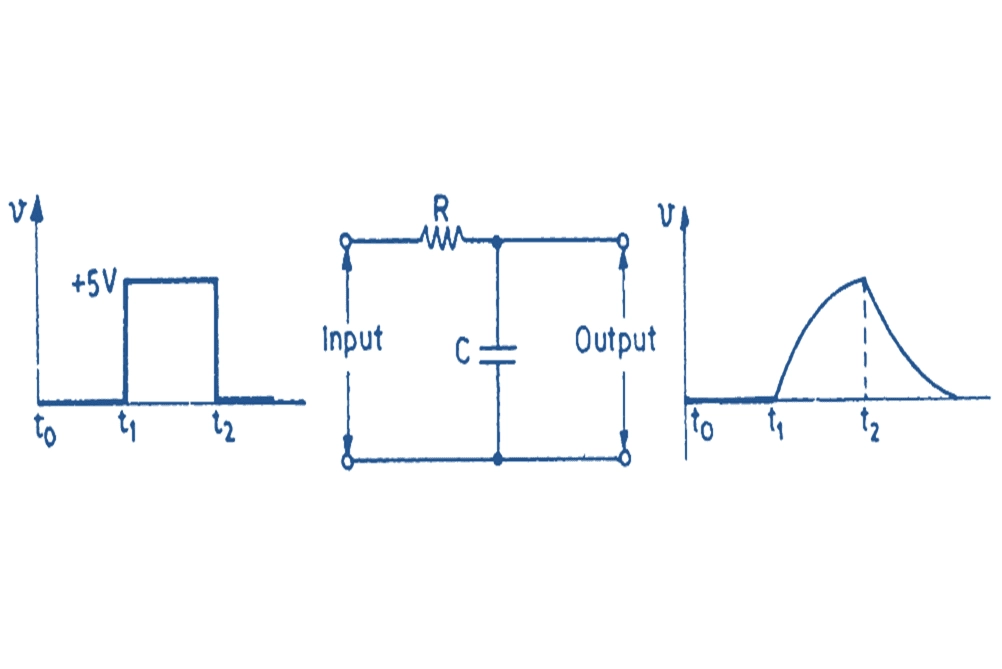
با استفاده از مدارهای RC با ثابتهای زمانی موردنیاز خود، میتوان اشکال موج RC مفیدی را به دست آورد. اگر شکل موج ولتاژ بهصورت یک موج مربعی را به مدار RC اعمال کنیم که عرض پالس آن دقیقه برابر 5𝛕 است. شکل موج خازن به صورت شکل زیر خواهیم داشت:
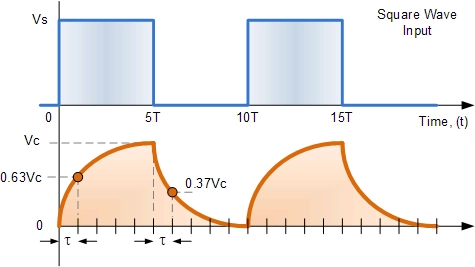
مطابق شکل زیر، تا زمانی که ولتاژ ورودی در سطح Vs است، خازن به تدریج در مدت 5𝛕 تا ولتاژ Vc شارژ میشود. در لحظهای که ولتاژ ورودی از Vs به 0 ولت تغییر میکند، خازن نیز در همان مدت 5𝛕 به صورت نمایی تخلیه میشود.
میتوان گفت که این مدار ترکیبی از دو مدار شارژ RC و دشارژ RC است. دورهی تناوب موج RC این مدار برابر 10 ثابت زمانی است. ثابت زمانی 10𝛕 به خازن این امکان را میدهد که در طول روشن بودن شکل موج ورودی (از 0 تا 5RC) به طور کامل شارژ شود.
سپس در طول خاموش بودن شکل موج ورودی (از 5RC تا 10RC)، به طور کامل تخلیه میشود. در نتیجه با شکل موج RC مطابقت دارد.
حال اگر دورهی تناوب سیگنال ورودی را طولانیتر کنیم (فرکانس کمتر از f<1/10RC)، خازن در مدت طولانیتر شارژ و دشارژ میشود و شکل موج RC ایجاد میشود.
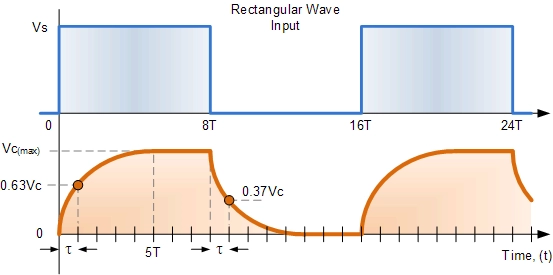
اگر دورهی تناوب کل شکل موج ورودی را کاهش دهیم (فرکانس بالاتر از f>1/10RC)، برای مثال 4RC، خازن زمان کافی برای شارژ کامل در طول زمان روشن بودن یا تخلیهی کامل در طول زمان خاموش بودن را نخواهد داشت. بنابراین، افت ولتاژ ایجاد شده در خازن، کمتر از ولتاژ ورودی آن خواهد بود و شکل موج RC مطابق شکل زیر ایجاد میشود.

پس با تغییر ثابت زمانی RC یا فرکانس شکل موج ورودی، میتوانیم ولتاژ خازن را تغییر دهیم که رابطهی بین VC و زمان t را ایجاد میکند. از این رابطه میتوان برای تغییر شکل موجهای مختلف استفاده کرد؛ به طوری که شکل موج دو سر خازن تا حدودی شبیه شکل موج ورودی باشد.
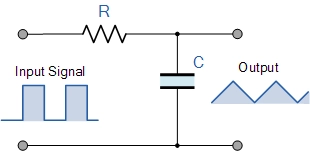
مدار انتگرال گیر، نوعی مدار فیلتر پایین گذر است که سیگنال ورودی موج مربعی را به خروجی موج مثلثی تبدیل میکند. همان طور که در متن بالا آموختیم، اگر ثابت زمانی 5RC در مقایسه با دورهی تناوب شکل موج RC ورودی، بزرگتر باشد. خروجی حاصل مثلثی شکل خواهد بود.
همچنین هر چه فرکانس موج RC ورودی بیشتر باشد، دامنهی خروجی در مقایسه با ورودی کمتر خواهد بود. زیرا خازن زمان کافی برای شارژ یا تخلیه شدن ندارد. بنابراین افت ولتاژ در دو سر خازن کمتر از ولتاژ منبع تغذیه خواهد بود. شکل موج خروجی مدار انتگرال گیر به صورت زیر است:
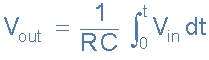
که از آن یک خروجی ولتاژ ایده آل برای مدار انتگرال گیر به صورت زیر به دست میآید:
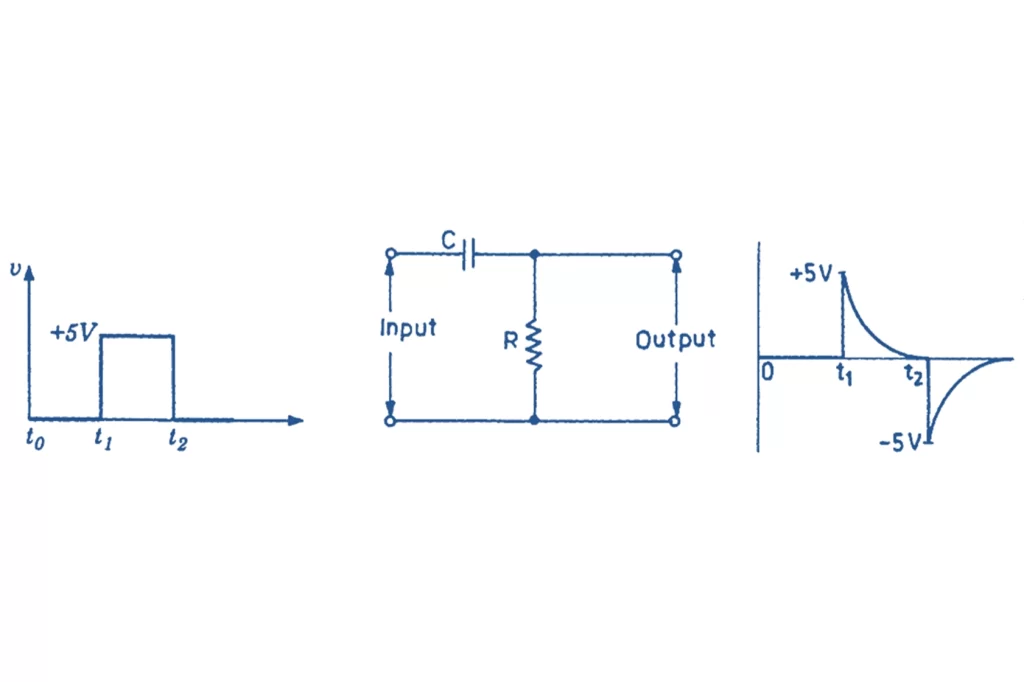
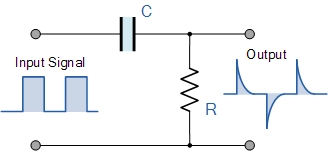
مدار مشتق گیر، نوعی مدار فیلتر بالا گذر است که میتواند سیگنال ورودی موج مربعی را در خروجی به ضربههای فرکانس بالا، تبدیل کند. اگر ثابت زمانی 5RC نسبت به دورهی تناوب شکل موج ورودی کمتر باشد، خازن قبل کامل شدن دورهی تناوب، سریع شارژ میشود.
هنگامی که خازن به طور کامل شارژ میشود، ولتاژ خروجی (دو سر مقاومت) به صفر میرسد. با تغییر شکل موج ورودی به لبهی پایین رونده، باعث میشود که خازن به صورت معکوس شارژ شود و در خروجی یک پاسخ ضربهی منفی را ایجاد کند. پس با تغییر موج ورودی در طول هر دورهی تناوب، پاسخ ضربه در خروجی از مقدار مثبت به مقدار منفی تغییر میکند.
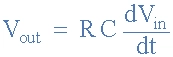
بنابراین، خروجی ولتاژ ایدهآل برای مدار مشتق گیر به صورت زیر خواهد بود:
اگر شکل موج RC ورودی را به یک سیگنال ولتاژ سینوسی تغییر دهیم، شکل موج RC خروجی بدون تغییر باقی میماند و فقط دامنهی آن تحت تأثیر قرار میگیرد.
با تغییر مکان مقاومت یا خازن در مدار، میتوان یک فیلتر پایین گذر یا بالا گذر مرتبهی اول ساده ایجاد کرد که پاسخ فرکانسی این دو مدار به مقدار فرکانس ورودی بستگی دارد.
سیگنالهای فرکانس پایین با تضعیف کم یا بدون تضعیف، از ورودی به خروجی منتقل میشوند. درحالیکه، سیگنالهای فرکانس بالا، بهطور قابل توجه تقریباً تا صفر تضعیف میشوند.
عکس این امر نیز برای مدار فیلتر بالا گذر صدق میکند. معمولاً، نقطهای که در آن، پاسخ مدار تا 3dB کاهش مییابد، فرکانس قطع، fc نام دارد و برای تعریف پهنای باند فیلترها، استفاده میشود. افت 3dB مربوط به کاهش ولتاژ خروجی به 70.7% از مقدار اولیه (t = 0) است.
![]()
که در آن RC ثابت زمانی مداری است که قبلاً تعریف شده است و میتوان آن را با 𝛕 جایگزین کرد. این نمونهی دیگری از نحوهی ارتباط مفاهیم حوزهی زمانی و حوزهی فرکانسی است.