
مقدمه: دیود شاتکی نوع دیگری...
در علم الکترونیک، مدار RC کاربردهای فراوانی مانند مدارهای شارژ و دشارژ را دارند که در وبلاگهای پیشین در مورد آنها بررسی کردهایم. مدار RC با سادهترین قطعات یعنی مقاومت و خازن، مدار سادهای به نظر میرسد.
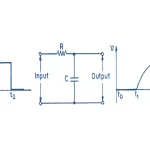
اما بسته به نوع و فرکانس سیگنال ورودی، رفتار و پاسخ متفاوتی خواهد داشت. در مدار انتگرال گیر RC غیرفعال، ورودی به مقاومت وارد شده و ولتاژ خروجی از خازن گرفته میشود.
میدانیم که شبکهی غیرفعال RC، چیزی جز مقاومت و خازن نیست که دارای یک مقاومت ثابت سری با راکتانس خازنی وابسته به فرکانس است.
با توجه به رابطهی راکتانس خازن (Xc=1/2πf)، فرکانس با ظرفیت خازنی رابطهی معکوسی دارد؛ یعنی با افزایش فرکانس، ظرفیت خازنی کاهش مییابد.
اگر سیگنال ورودی یک موج سینوسی شکل باشد، مدار انتگرال گیر RC به سادگی به عنوان یک فیلتر پایین گذر ساده (LPF) بالای فرکانس قطع متناظر با ثابت زمانی عمل میکند.
همان طور که میدانیم، ثابت زمانی مدار RC رابطهی بین مقاومت و ظرفیت خازن را نسبت به زمان برحسب ثانیه بیان میکند و با مقادیر مقاومت و خازن نسبت مستقیم دارد. پس در حالت کلی، نرخ شارژ یا دشارژ به ثابت زمانی RC وابسته است.
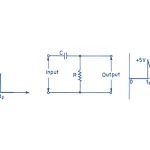
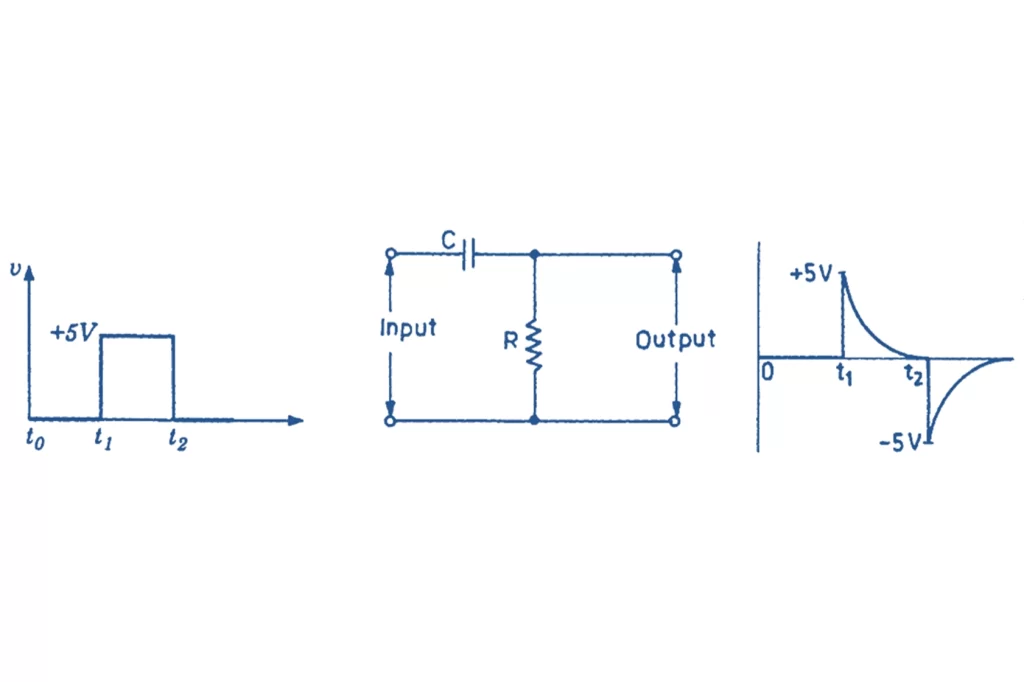
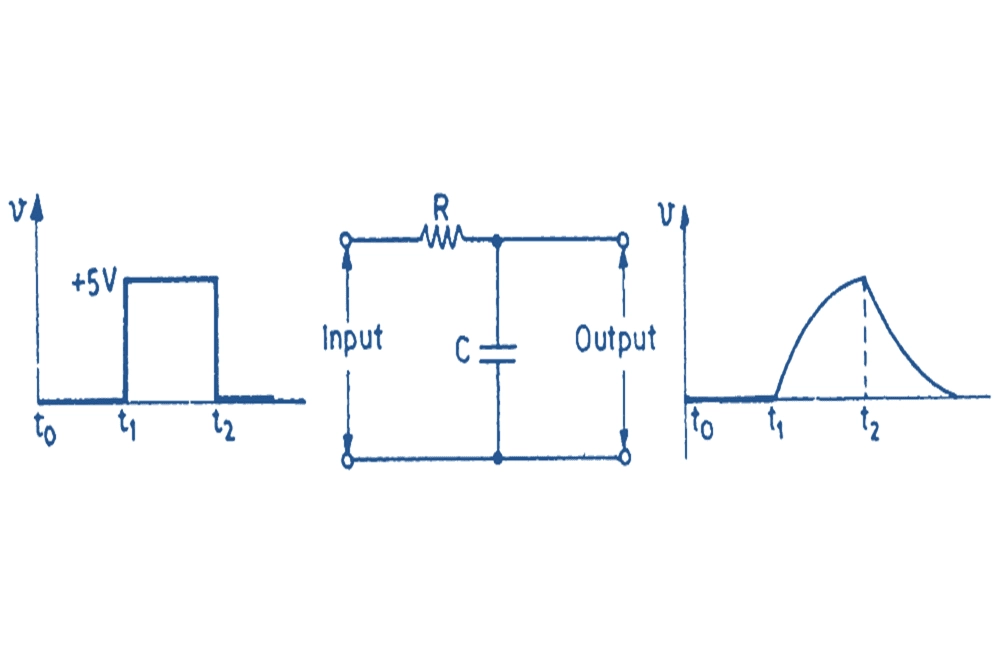
مدار شکل زیر را در نظر بگیرید. در مدار انتگرال گیر RC، سیگنال ورودی به مقاومت اعمال میشود و خروجی از خازن گرفته میشود؛ بنابراین میتوان گفت که Vc = Vout.
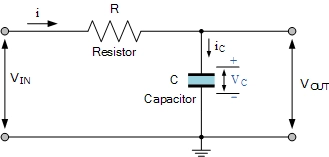
از آنجایی که خازن یک قطعه وابسته به فرکانس است، مقدار بارهای روی صفحات آن برابر با انتگرال زمانی جریان است. به این معنی است که زمان مشخصی باید سپری شود تا خازن کامل شارژ شود.
زیرا خازن نمیتواند به صورت آنی شارژ گردد و فرایند آن به صورت نمایی است؛ بنابراین، جریان خازن را میتوان به صورت زیر نوشت:
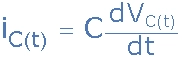
معادلهی بالا را میتوان با تغییر لحظهای بار Q نسبت به زمان با معادلهی ic = dQ/dt بیان کرد که در آن بار Q برابر با حاصلضرب ظرفیت خازنی در ولتاژ خازنی یعنی Q = C x V است.
سرعت یا نرخ شارژ و دشارژ خازن نسبت مستقیم با مقدار مقاومت و ظرفیت خازن دارد که ثابت زمانی مدار را نشان میدهد؛ بنابراین، ثابت زمانی مدار انتگرال گیر، برابر با حاصلضرب R در C است.
از طرفی ظرفیت خازن برابر است با Q / Vc است، که در آن Q شارش جریان i در زمان t است و با حاصلضرب جریان در زمان بیان میشود. یکای Q، کولن (Coulomb) است.
همچنین، با توجه به قانون اهم میدانیم که ولتاژ V برابر i × R است. با جایگذاری این مقدار در معادلهی ثابت زمانی RC، ثابت زمانی به صورت زیر به دست میآید:
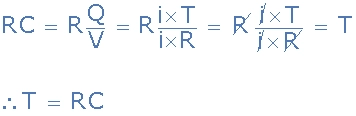
پس از ساده سازی معادلهی بالا، فقط t باقی میماند که نشان میدهد ثابت زمانی مدار انتگرال گیر RC دارای بعد زمانی و برحسب ثانیه است و آن را با حرف یونانی 𝛕 نامگذاری میشود.
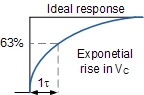
توجه کنید که ثابت زمانی، زمان لازم (برحسب ثانیه) را برای آن نشان میدهد که شارژ خازن به 63.2 درصد بیشینهی ولتاژ برسد یا به اندازهی 36.8 درصد بیشینهی ولتاژ، خازن تخلیه شود.
میدانیم که خروجی انتگرال گیر RC برابر با ولتاژ خازن است. این ولتاژ، متناسب با بار Q است که در خازن ذخیره میشود و برابر با C x V است.
بنابراین میتوان گفت که ولتاژ خروجی، انتگرال ولتاژ ورودی است و مقدار آن به مقادیر مقاومت، ظرفیت خازن و در نتیجه ثابت زمانی وابسته است.
میدانیم که جریان خازن را میتوان برحسب تغییرات بار نسبت به زمان بیان کرد؛ بنابراین، طبق یک قاعدهی کلی از حساب دیفرانسیل، مشتق Q نسبت به زمان (dQ /dt) و در نتیجه i = dQ / dt را میتوان با رابطهی زیر بیان کرد:
Q = ∫idt (شارژ Q خازن در هر لحظه از زمان)
از طرفی، چون ورودی به مقاومت سری وارد میشود؛ جریان مشابهی از مقاومت و خازن عبور میکند (iR = iC)، افت ولتاژ VR را در دو سر مقاومت ایجاد خواهد کرد. جریان برابر است با:
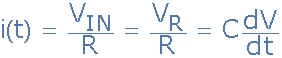
ولتاژ خروجی به صورت زیر خواهد بود:

چون i = Vin / R، با جایگذاری و کمی تغییرات، معادلهی ولتاژ خروجی تابعی از زمان خواهد بود:

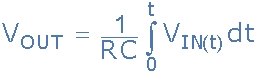
بنابراین، خروجی مدار انتگرال گیر RC، برابر با انتگرال ولتاژ ورودی با ضریب 1 / RC خواهد بود. با فرض این که شارژ اولیهی خازن برابر صفر است، یعنی Vout (t = 0) = 0 و ولتاژ ورودی ثابت است. معادلهی ولتاژ خروجی در حوزهی زمان به صورت زیر بیان میشود:
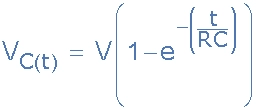
با اعمال ولتاژ پلهای مثبت به مدار، خازن از طریق مقاومت با نرخ RC شارژ و دشارژ میشود. میدانیم که ولتاژ خروجی به صورت نمایی تغییر میکند.
پاسخ مدار به هنگام شارژ به صورت زر است:
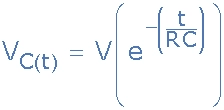
در حالت تخلیه یا دشارژ نیز داریم:
بنابراین، اگر فرض کنیم ولتاژ خازن برابر با یک ولت است، میتوانیم درصد شارژ یا دشارژ خازن را برای هر ثابت زمانی مطابق جدول زیر رسم کنیم.
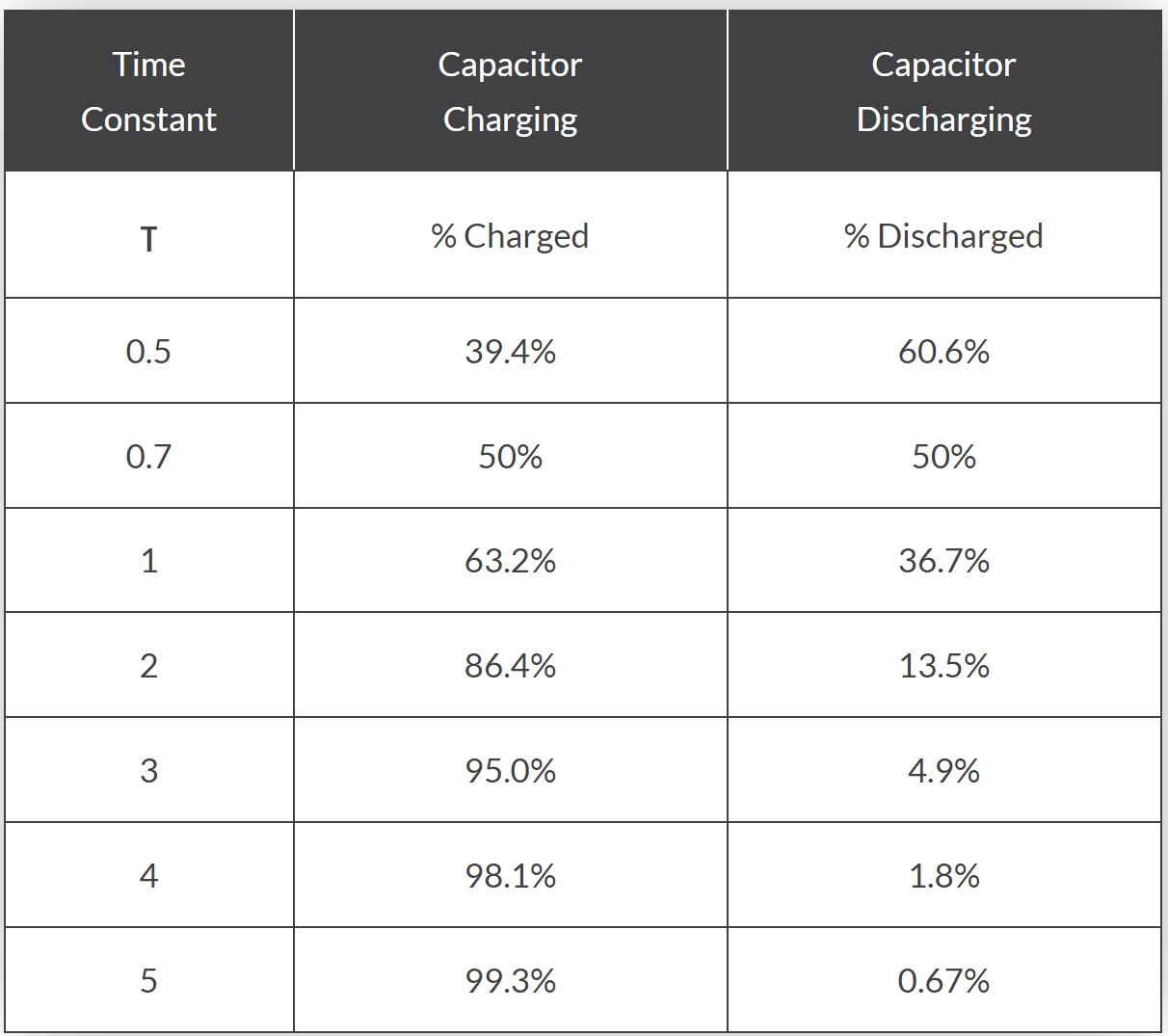
همانطور که میبینیم بعد از گذشت 5 ثابت زمانی یا بیشتر از آن، خازن به طور کامل شارژ یا دشارژ میشود.
مدار شکل زیر را در نظر بگیرید. ثابت زمانی مدار برابر با RC = 100kΩ x 1uF = 100ms است. اگر ولتاژ پلهای را به ورودی را با دورهی تناوب 200 میلی ثانیه وارد کنیم؛ طبق جدول بالا، خازن تا 86.4 درصد شارژ میشود.
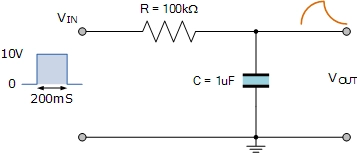
اگر این پالس، دارای دامنهی 10 ولت باشد؛ قبل از آنکه خازن از طریق مقاومت دوباره تخلیه شود، ولتاژ برابر با 8.64 ولت خواهد بود، زیرا پالس ورودی به صفر برمیگردد.
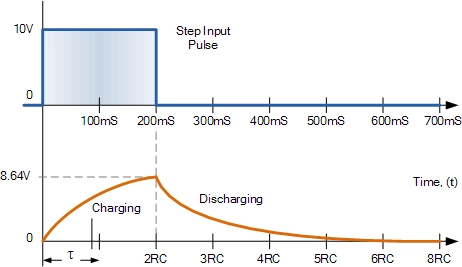
باید توجه کرد که مقدار اولیه خازن در حالت دشارژ برابر با 8.64 ولت (دو ثابت زمانی) است (نه 10 ولت). چون ثابت زمانی RC ثابت است، هر تغییر در پهنای پالس ورودی بر خروجی مدار انتگرال گیر RC تأثیر خواهد گذاشت.
اگر پهنای پالس افزایش یابد و به 5RC یا بزرگتر از آن برسد، شکل پالس خروجی، مشابه شکل ورودی خواهد بود؛ زیرا ولتاژ خروجی به همان مقدار ورودی میرسد.
با این حال، اگر پهنای پالس به زیر 5RC کاهش یابد؛ خازن فقط تا حدی شارژ میشود و به حداکثر ولتاژ ورودی نمیرسد در نتیجه، ولتاژ خروجی کمتر میشود؛ زیرا ولتاژ خروجی متناسب با انتگرال ولتاژ ورودی است.
پس اگر پالس ورودی را برابر با یک ثابت زمانی یعنی 1RC در نظر بگیریم؛ خازن نه بین 0 و 10 ولت بلکه بین 63.2% و 38.7% ولتاژ دو سر خازن، در زمان تغییر شارژ و تخلیه میشود. این مقادیر با ثابت زمانی RC تعیین میشوند.
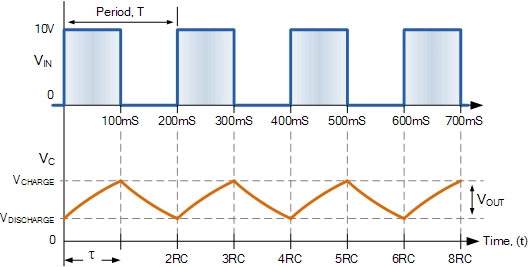
در عمل برای این که مدار انتگرال گیر به درستی کار کند، ثابت زمانی مدار باید به اندازه کافی بزرگتر (معمولاً 10 برابر) از دورهی تناوب پالس ورودی باشد؛ یعنی RC >> T.
در بالا دیدیم که مدار انتگرال گیر RC میتواند عملیات انتگرال گیری را با وارد کردن پالس ورودی انجام دهد که منجر به خروجی مثلثی شکل میشود؛ اما اگر فرآیند را معکوس کنیم و موج مثلثی شکل را به ورودی وارد کنیم، چه اتفاقی خواهد افتاد؟
با وارد کردن موج مثلثی به ورودی، خروجی مدار به دلیل انتگرال گیری در حوزهی زمان از سیگنال شیب، یک شکل موج سینوسی خواهد بود.
راههای مختلفی برای تولید شکل موج سینوسی وجود دارد؛ اما سادهترین و ارزانترین برای تولید موج سینوسی، استفاده از یک جفت مدار انتگرال گیر RC غیرفعال است که مطابق شکل زیر به صورت سری به یکدیگر متصل شدهاند.
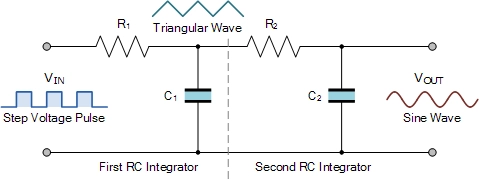
انتگرال گیر RC اول، ورودی پالسی اصلی را به یک شکل موج مثلثی تبدیل میکند. این شکل موج خروجی، ورودی انتگرال گیر RC دوم است. انتگرال گیر دوم نقطههای تغییر شیب (نقطههای شکستگی) شکل موج مثلثی را هموار کرده و آن را به یک شکل موج سینوسی تبدیل میکند.
دیدیم که اساس کار مدار انتگرال گیر RC، یک مدار فیلتر پایین گذر RC است که وقتی یک پالس ولتاژ پلهای به آن وارد شود، خروجی آن رابطهی مستقیمی با انتگرال ورودی دارد.
ثابت زمانی مدار RC همیشه با دورهی تناوب ورودی، مقایسه میشود؛ بنابراین، ثابت زمانی RC بزرگ، یک شکل موج مثلثی با دامنهی کم در مقایسه با سیگنال ورودی ایجاد میکند.
زیرا خازن زمان کمتری برای شارژ یا دشارژ کامل دارد. اما ثابت زمانی کوچک، به خازن زمان بیشتری برای شارژ و دشارژ میدهد و شکل گردتری را ایجاد میکند.
با اتصال دو مدار انتگرال گیر RC به یکدیگر به صورت سری، میتوان اثر انتگرال دوگانه روی پالس ورودی را دریافت. نتیجهی این انتگرالگیری دوگانه، تولید موج سینوسی شکل است. البته دامنه این شکل موج خروجی، نسبت به دامنهی ورودی به اندازهی قابل توجهی کاهش مییابد.